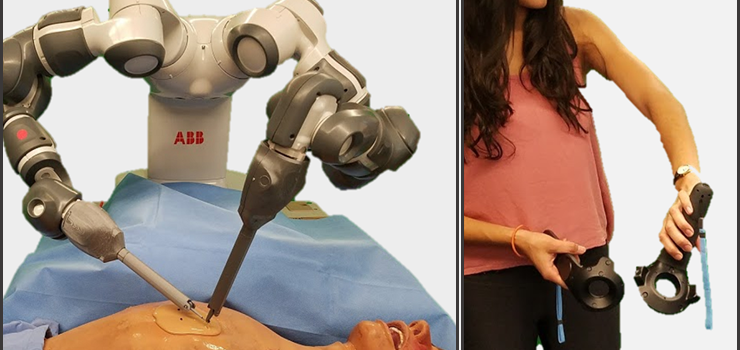
Telerobotic Surgery with Free Hand Gestures
Description: Current teleoperated robot-assisted surgery requires surgeons to manipulate joystick-like controllers in a master console, and robotic arms will mimic those motions on the patient’s side. It is becoming more popular compared to traditional minimally invasive surgery due to its dexterity, precision and accurate motion planning capabilities. However, one major…