Motor Driven Robot with Instantaneous Wing Motion Control
We developed several generations of high frequency flapping wing insect robot. The video on the left shows lifting on guide wire. The one on the right shows a 2.61 gram robot with lift up to 47mN. Wingbeat frequency is up to 65Hz. Experimental results show that 120º amplitude is the optimal configuration for lift to power efficiency. (AIAA,TRMech papers)
Wing Optimization for Lift Generation
The performance of different wing design varies substantially. We compared manmade wings and cicada wingson lift force generation. Force measurements showed better performance on cicada wings at high frequency. Near field and far field flow measurements using PIV system clearly showed more uniform flow and lift force coefficients on cicada wings, compared to man-made wings. (AIAA, IROS, TRMech, ICRA13 papers)
Comparison of cicada and manmade wings (35Hz).
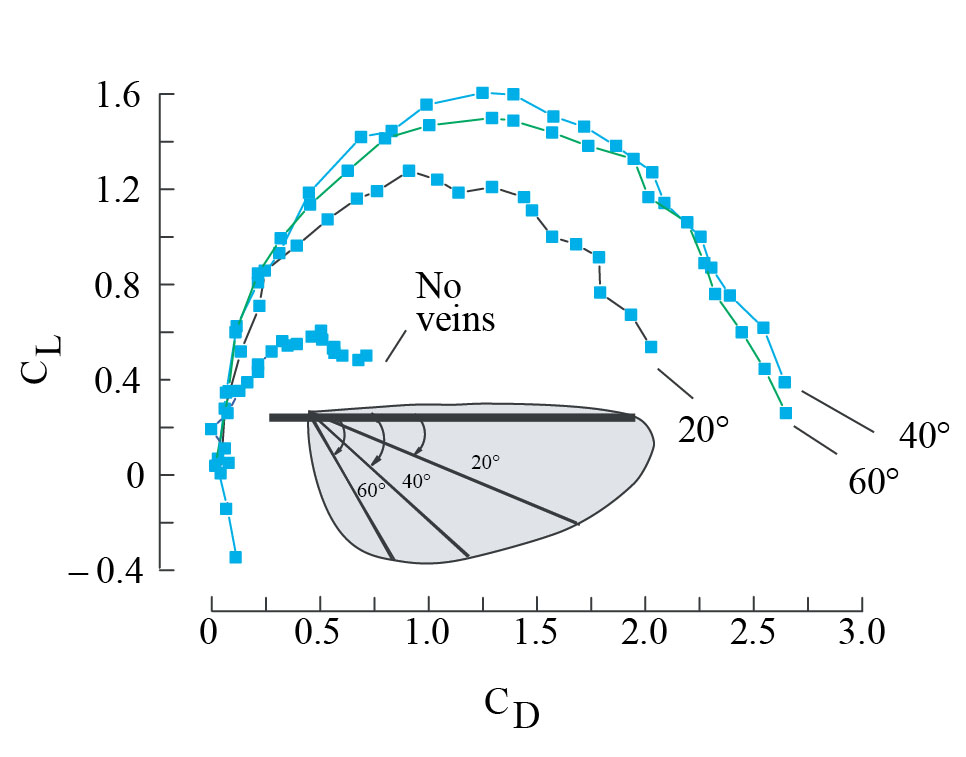
Plar plots of wings with different veination patterns.
Motor Driven Robot lifting off with cicada wings.
Bio-robotics Laboratory
School of Mechanical Engineering,
Purdue University,
West Lafayette, IN 47907
Email: xdeng@purdue.edu Phone: 765-494-1513 Fax:765-496-7537