| Page | Description | Type |
| 24 | Very last line, D matrix, n x r should read m x r | Equation |
| 26 | Linearization equation, (x1-x2o) should be (x2-x2o) | Equation |
| 27 | Figure 8, all f(xo,yo) should be f(xo) --occurs three times in Figure 8 | Equation |
| 30 | Linearization Equations, errors in coefficients | Equation |
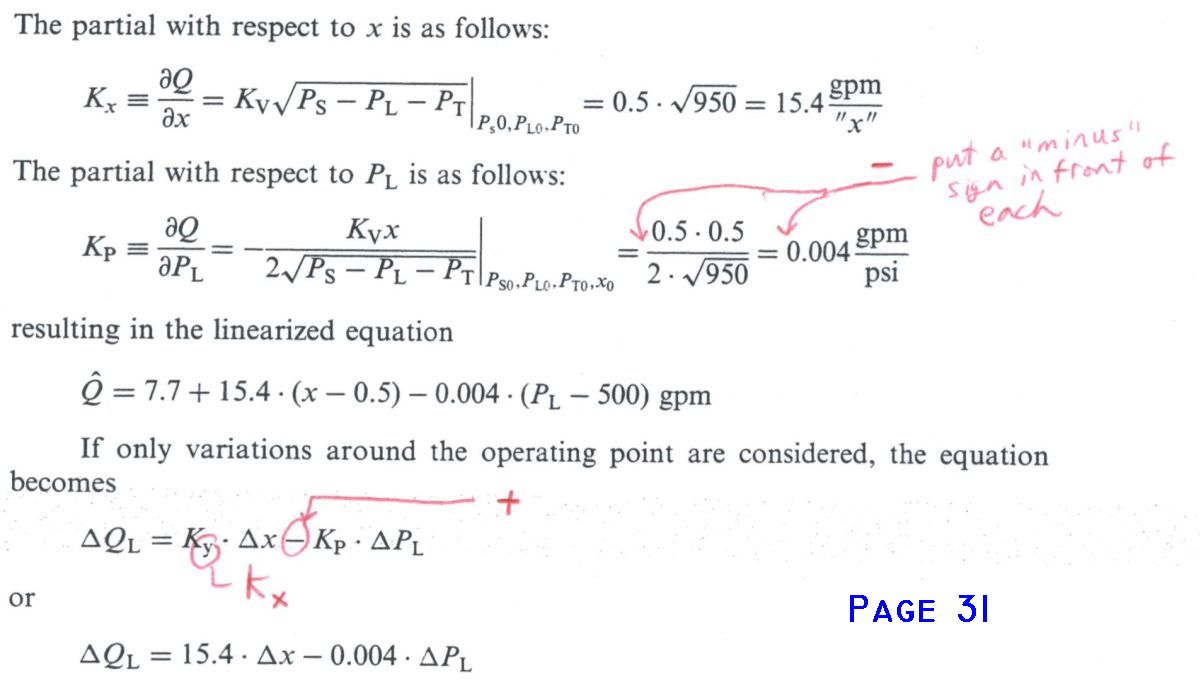
| 31 | Equation, 4th from last, Kp=...,
last two terms should have a minus sign out
front. Equation, 2nd from last, DQL =..., should be plus, not minus (the Kp is already negative). Equation, 2nd from last, DQL =..., Ky should be Kx . |
Equation |
| 35 | Extra minus sign in fourth equation is not needed | Equation |
| 36 | Sum of torques added before 2nd equation (T is already used as a specific applied torque) | Equation |
| 39 | Last equation, A/Kp should be A2/Kp. | Equation |
| 42 | Last equation, qb, should just be qb = h1/R1 | Equation |
| 43 | First two equations affected by change on page 42. | Equation |
| 47 | Row in Table for 1 Junction, Equations column, no minus sign before the last zero | Equation |
| 53 | d1/d2 should be d2/d1 in several locations | Equation |
| 54 | Fix equations 5 and 10, missing terms in the f2 and dq4/dt equations | Equation |
| 55 | Fix bond graph in Figure 24 and A matrix element(1,1). J, K, and L should be L, R, and C | Figure, Matrix |
| 58 | Figure 28, bond graph causality assignment errors | Figure |
| 67 | Figure 41 missing R(s) on Block Diagram input, Figure 42 missing + sign in summing junction | Figure |
| 68 | y1 should be x2 in problem 2.17 | Equation |
| 77 | Remove "performing two integrals special" from first paragraph, line 2 | Text |
| 78 | Remove "position and velocity" from paragraph 1, lines 4-5 | Text |
| 80 | Equations 6 and 7, -A1+3A2=1 and A2 = 2/3 (two locations) | Equation |
| 83 | Greek symbols "zeta" not used for damping ratio, 3rd equation should have minus sign inside square root | Symbols |
| 84 | Greek symbols "zeta" not used for damping ratio | Symbols |
| 85 | New equation for rise time, tr, first equation, and Greek "zeta" replacement in 3 other locations | Equation, Symbol |
| 86 | Added new line of tr*wn on Figure 6, changed last sentence of last complete paragraph, "zeta" in 1st equation | Figure, Equation |
| 89 | Greek symbols "zeta", 2nd order Impulse response should have minus sign inside the square root | Equation, Symbol |
| 94 | End of first equation, k3 s (s+5) was missing the s | Equation |
| 96 | Greek symbols "zeta" not used for damping ratio in two locations | Symbols |
| 100 | Equations shown in Figure 8 are updated and expanded | Figure |
| 105 | Last equation, t is missing in exp(-1/tau), should be exp(-t/tau) | Equation |
| 125 | Add "Remember that initial conditions are not included" to end of paragraph 3 (3.6.1) | Text |
| 126 | Y(s)/U(s) and next two G(s) should be in bold (matrices), Adjoint is all one word in the 5th equation | Equation |
| 129 | Add y=… output for state space model | Equation |
| 130 | Figure 26, -b/m and -k/m in feedback paths | Figure |
| 131 | End of 4th equation, last character, "u" should be "r" | Equation |
| 132 | Differential equation of problem 3.4, '32' should be '32 y' | Equation |
| 147 | Add "(-)" after "the final output value (-) since the…" in line 7 | Text |
| 148 | A2 (squared) instead of A, first and third equations | Equation |
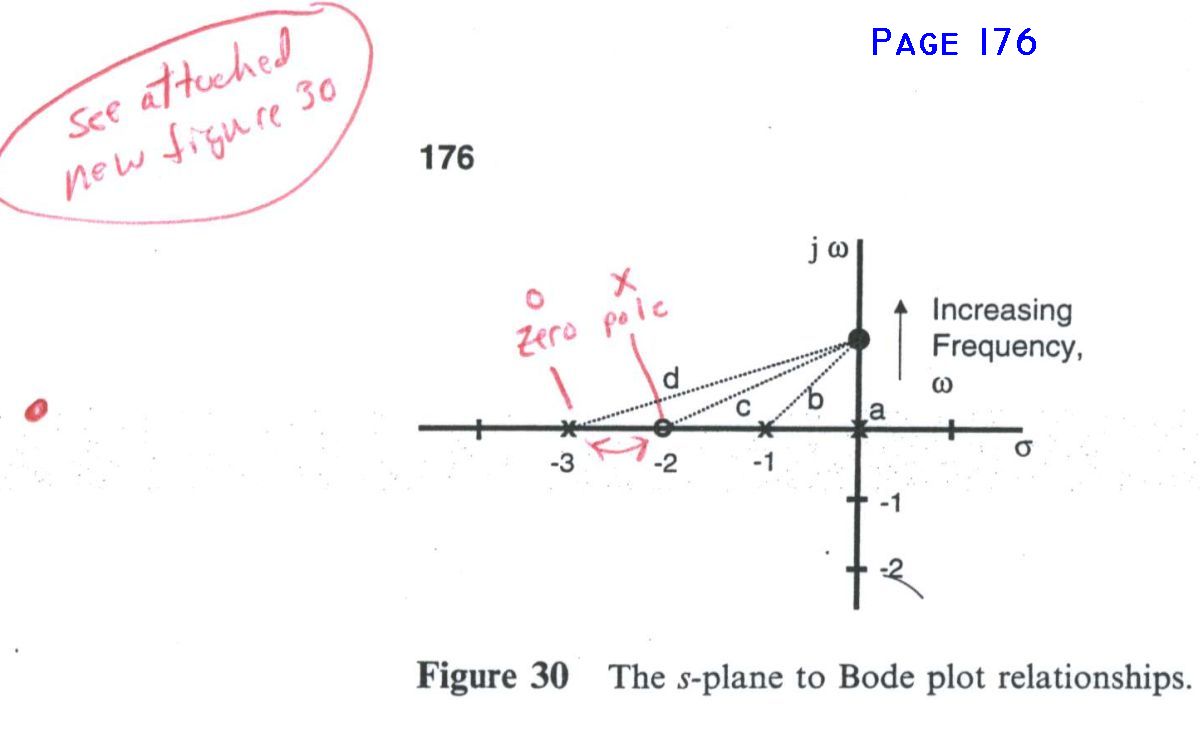
| 176 | Figure 30, pole and zero at -3 and -2 are switched | Figure |
| 210 | System transfer function: should read "Plant transfer function:" | Text |
| 213 | Expanded explanation, 6 should be 5 in the numerator, K's change value | Equation |
| 214 | 3rd from last line, two zeros (not poles) and last line, 0 and -3, not 0 and -1 | Text |
| 243 | Change figure 54 caption to read "(additional gain factor of 4)" | Caption |
| 257 | Figure 70 caption, 3.3011 rad/sec instead of 33.011 | Caption |
| 268 | Text reads "less than", should read "equal to" (para 2, line 1) | Text |
| 274 | The problem statement should end with "methods if Ku = 20." | Text |
| 275 | Figure 93, C(s) and R(s) are switched | Figure |
| 280 | The word "If" should be "In", line 2 | Text |
| 282 | OpAmp table parentheses needed in PI, PD, and PID equations | Equation |
| 283 | Approximate PD parentheses location, C's in equations should be C1 | Equation |
| 292 | The word "capacitive" should be "capacitance" (para 2, line 7) | Text |
| 299 | Various locations, the word "pump" should be "motor" | Text |
| 322 | First two equations, missing minus sign (eq 1), and x dt and u dt (eq 2) | Equation |
| 324 | f*(t), not f times (t), second to last line, "model", not "modeled" | Equation, Text |
| 336 | In the 5th equation, should be K, not a Z | Equation |
| 349 | "b=2" in 9th text line, 4th and 5th equation coefficients, "20" should be "8", 4th equation, b2 | Equation, Text |
| 355 | Denominator in 5th equation, -1.67z, not -1.67, z is missing | Equation |
| 356 | Numerator in 5th equation, 0.135, not 0.0135; Step 4, 21=1 should be 2-1=1 | Equation |
| 357 | Figure 13, wrong pole location, first three equations, wrong decimal point location (as in previous page) | Figure |
| 359 | Numerator in only equation, 0.135, not 0.0135 | Equation |
| 365 | "is" should be "it" (minor typo) | Text |
| 366 | "the goal is obtaining" (minor typo) | Text |
| 369 | "great enough" should be "short enough" | Text |
| 373 | "s" should be "10" and = sign should be minus sign | Equation | 375 | "2" should be "s" in the equation | Equation | tr height="18" style="height:13.2pt">378 | Equation in example 9.5 | Equation | tr height="18" style="height:13.2pt">386 | Second equation 0.6 should be 0.06 | Equation |
| 438 | "1.4.1" Section Heading should be "11.4.1" (minor typo) | Text |
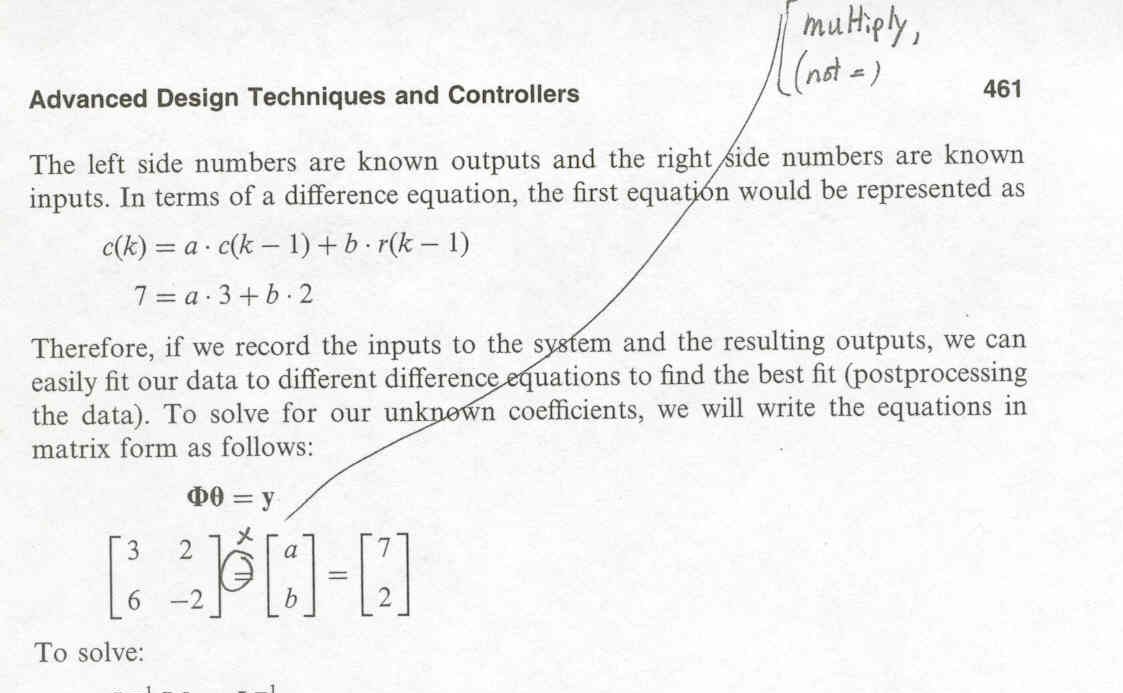
| 461 | = sign should be x in the 4th equation | Equation |
| 468 | Matrix symbols should be bold in several locations | Formatting |
| 493 | "b" should be "b2" in problem 11.21 | Equation |
| 528 | Minus signs should be plus signs in the first (DQ) equation | Equation |
| 547 | q13 should be q15 in last equation | Equation |
| 548 | In the 2nd equation, before last term, minus sign should be a plus sign, Inertia units denominator in^5 | Equation |
| 549 | Minus sign should be plus sign, end of last equation (+ ARxdot) | Equation |
| 550 | Figure 66, two labels are inverted "V/B" should be "B/V" | Figure |
| 567 | Row and column vector definitions are reversed | Text |
| 568 | Matrix summing equation, sum to n, not q | Equation |
| 569 | List no. 5 should read "Unit Acceleration", not "Unit Ramp" | Text |
| 570 | Equation 12, time domain, 2nd minus sign should be a plus sign (at-1+e-at) | Equation |
| 579 | Answer for 2.18, "k)2)x" should be "k)xo" | Answer |
| 580 | Answer for 5.21 and 5.22, , K=20; PM=55deg, GM=21.7dB, K=12.2 | Answer |
| 581 | Answer for 7.17, after "B" matrix should be r(k), not a "1" | Answer |
| 594 | Self-tuning, adaptive, is at Page 471 (not page 47) | Page number |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}