Temporal Analysis
In order to maintain temporal consistency of the texture regions,
the video sequence is first divided into groups of frames (GoF). Each GoF
consists of two reference frames (first and last frame of the considered GoF)
and several middle frames between the two reference frames. The reference frames
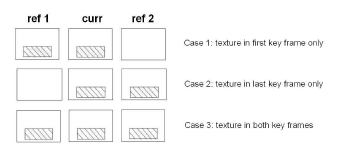
will either be I or P frames when they are coded. For every texture region in
each of the middle frames we look for similar textures in both reference frames.
The corresponding region (if it can be found in at least one of the reference
frames) is then mapped into the segmented texture region. There are three
possible cases, the texture is only found in the first reference frame, the last
reference frame, or it is found in both reference frames. In most cases, similar
textures can be found in both reference frames.
In this case, the the texture that results in the smallest error will be considered. The details of the
metrics for the error will be described later in this section. The texture
regions are warped from frame-to-frame using a motion model to provide temporal
consistency in the segmentation. The mapping is based on a global motion
assumption for every texture region in the frame i.e. the displacement of the
entire region can be described by just one set motion parameters. We modified a
8-parameter (i.e. planar perspective) motion model to compensate the global
motion. This can be expressed as:
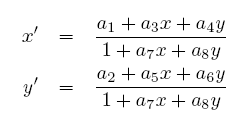 Where (x, y)
is the location of the pixel in the current frame and (x,
y) is the corresponding mapped
coordinates. The planar perspective model is suitable to describe arbitrary
rigid object motion if the camera operation is restricted to rotation and zoom.
It is also suitable for arbitrary camera operation, if the objects with rigid
motion are restricted planar motion. In practice these assumptions often hold
over a short period of a GoF. When an identified texture region in one of the
middle frames (current frame) is warped towards the reference frame of the GoF,
only the pixels of the warped texture region that lie within the corresponding
texture region of the reference frame of the GoF are used for synthesis.
Although this reduces the texture region in the current frame, it is more
conservative and usually gives better results. The motion parameters (a0,
a1,
. . . , a8)
are estimated using a simplified implementation of a robust M-estimator for
global motion estimation.
Where (x, y)
is the location of the pixel in the current frame and (x,
y) is the corresponding mapped
coordinates. The planar perspective model is suitable to describe arbitrary
rigid object motion if the camera operation is restricted to rotation and zoom.
It is also suitable for arbitrary camera operation, if the objects with rigid
motion are restricted planar motion. In practice these assumptions often hold
over a short period of a GoF. When an identified texture region in one of the
middle frames (current frame) is warped towards the reference frame of the GoF,
only the pixels of the warped texture region that lie within the corresponding
texture region of the reference frame of the GoF are used for synthesis.
Although this reduces the texture region in the current frame, it is more
conservative and usually gives better results. The motion parameters (a0,
a1,
. . . , a8)
are estimated using a simplified implementation of a robust M-estimator for
global motion estimation.