Lab 4b Tips: Variable Reluctance Stepper Motor
In-lab
- Note the torque transducer offset before you turn on the stepper motor. This offset will help you explain discrepancies in the post-lab.
- The torque transducer display measures in oz-in, for this class use the conversion 141.6 oz-in = 1 Nm. The voltage output, through the co-axial cable behind the amplifier, is set to 1 V = 15 oz-in.
- Turn the rotor the same direction for each phase's torque versus position measurements. This way the offset always shifts the measured torque in the same direction and your torque plots will line up better.
- Remember to stop the host each time before calling the 'steptorq' function.
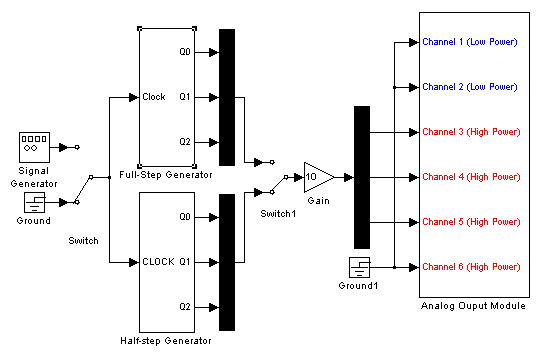
- You can use this model for the steady state part of the lab. Its more convenient than rebuilding/compiling if you need to repeat either full-step or half-step mode experiments.
Check your work.
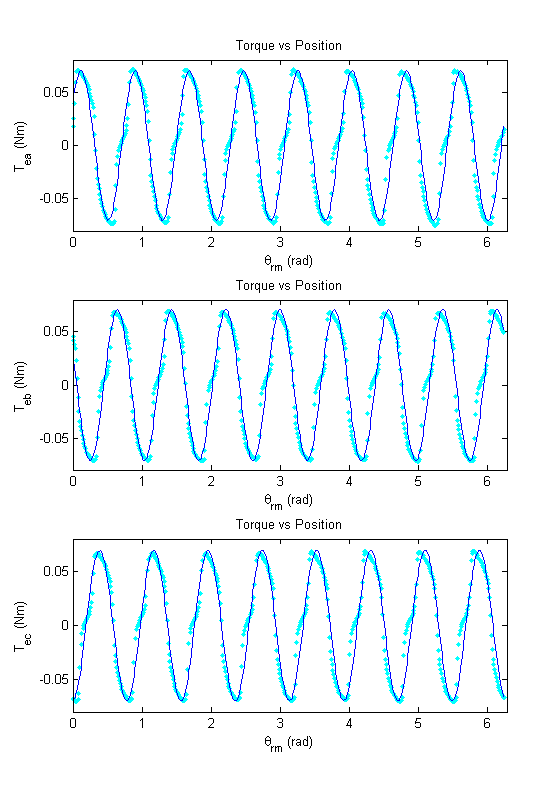
- Measured and predicted torque plots
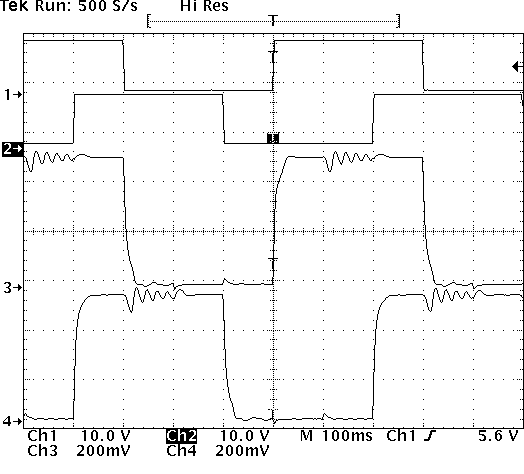
- Full Step Scope Plot
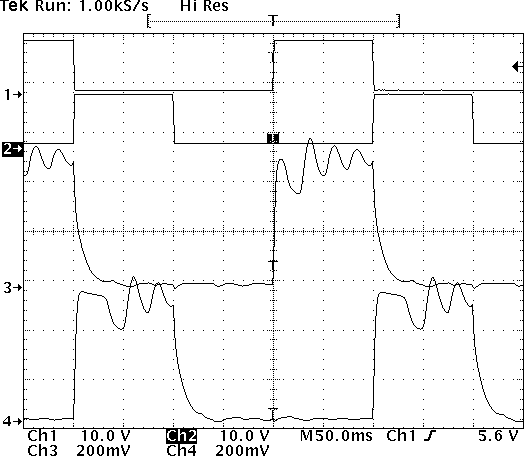
- Half Step Scope Plot