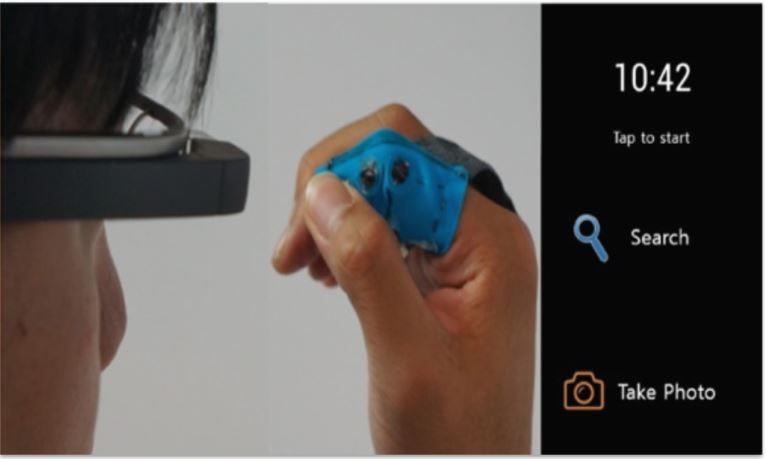
Wearable Textile Input Device with Multimodal Sensing for Eyes-Free Mobile Interaction during Daily Activities
Pervasive and Mobile Computing (2016), 33, 17-31
As pervasive computing is widely available during daily activities, wearable input devices which promote an eyes-free interaction are needed for easy access and safety. We propose a textile wearable device which enables a multimodal sensing input...
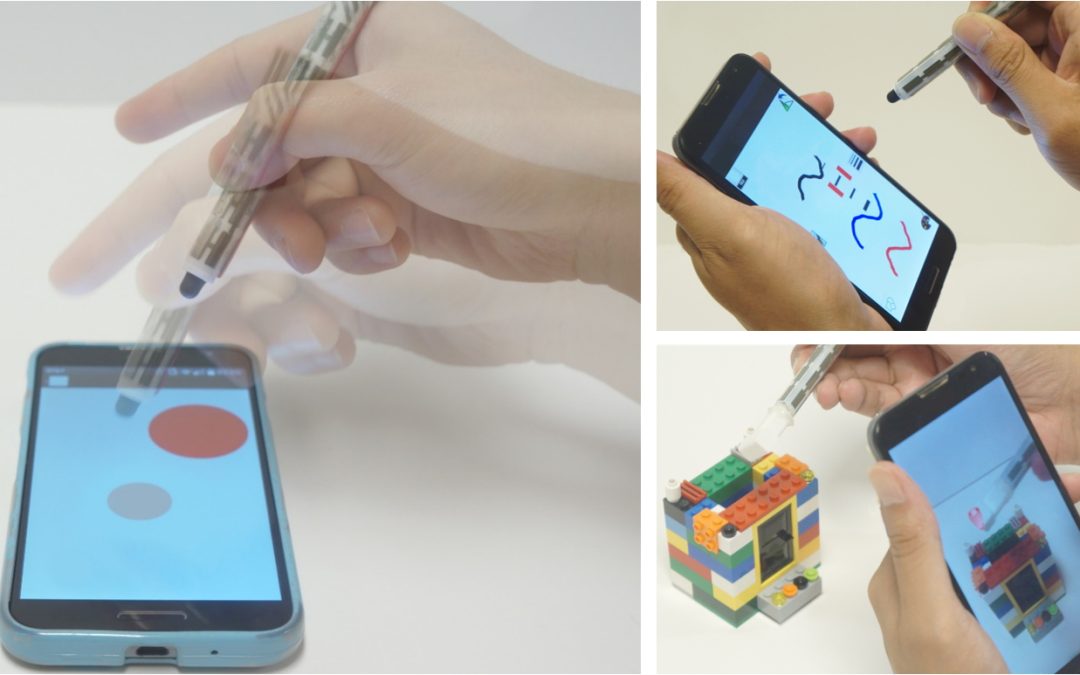
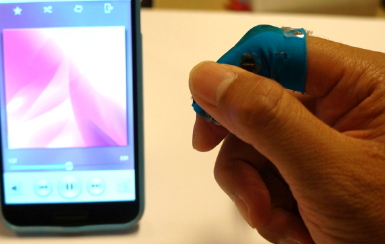
TMotion: Embedded 3D Mobile Input using Magnetic Sensing Technique
In Proceedings of the 10th International Conference on Tangible, Embedded, and Embodied Interaction (TEI'16), Eindhoven, Netherlands, 2016 (Acceptance Rate: 27%)
Abstract: We present TMotion, a self-contained 3D input that enables spatial interactions around mobile device using a magnetic sensing technique. We embed a permanent magnet and an inertial measurement unit (IMU) in a stylus. When the stylus moves...

Best Poster Award at UIST 2015
Sang Ho Yoon, Ke Huo, and Professor Karthik Ramani receive Best Poster Award at UIST 2015 School of Mechanical Engineering Graduate Students Sang Ho Yoon and Ke Huo, and Professor Karthik Ramani from C Design Lab received the People’s Choice Best...
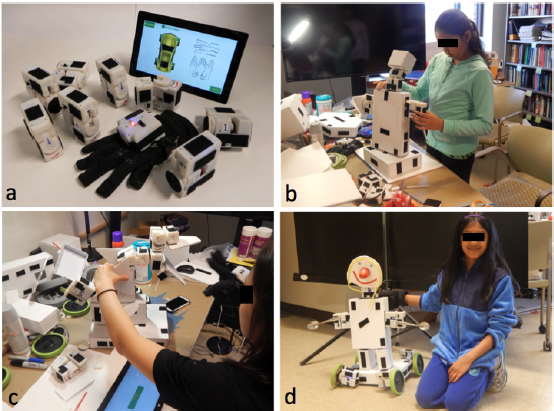
HandiMate: Exploring a Modular Robotics kit for Animating Crafted Toys
In Proceedings of the 14th International Conference on Interaction Design & Children (IDC'15), Tufts University, USA, 2015
Building from our previous work we explore HandiMate, a robotics kit which enables users to construct and animate their toys using everyday craft materials [32]. The kit contains eight joint modules, a tablet interface and a glove controller....

Indiana-Made Robot Toy Merges Creativity, Technology
Move over, LEGO Mindstorm and K'NEX. There's a new robot toy in town, and it was created right here in Indiana. The HandiMate robot toolkit is the brainchild of Purdue University Professor of Mechanical Engineering Karthik Ramani, and it could soon...
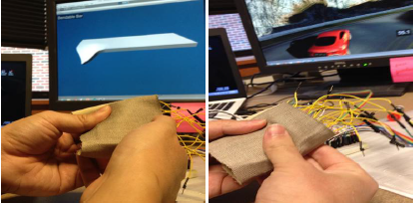
TIMMi: Finger-worn Textile Input Device with Multimodal Sensing in Mobile Interaction
In Proceedings of the 9th International Conference on Tangible, Embedded, and Embodied Interaction (TEI'15), Stanford University, USA, 2015
Abstract: We introduce TIMMi, a textile input device for mobile interactions. TIMMi is worn on the index finger to provide a multimodal sensing input metaphor. The prototype is fabricated on a single layer of textile where the conductive silicone...

SOFTii: Soft Tangible Interface for Continuous Control of Virtual Objects with Pressure-based Input
Proceedings of the 9th International Conference on Tangible, Embedded, and Embodied Interaction, Jan 15-19, Stanford University, USA. pp 539-544, 2015
We present SOFTii, a flexible input system for topography design and continuous control via external force. Our intent is to provide a tactile metaphor for pressure-based surface input. In this study, two prototypes of SOFTii have been fabricated:...

Plex: Finger-Worn Textile Sensor for Mobile Interaction during Activities
In Proceedings of the International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct Publication (Ubicomp'14 Adjunct), Seattle, USA, 2014.
Abstract: We present Plex, a finger-worn textile sensor for eyes-free mobile interaction during daily activities. Although existing products like a data glove possess multiple sensing capabilities, they are not designed for environments where body...
BendID: Flexible Interface for Localized Deformation Recognition
Proceedings of the ACM international Joint Conference on Pervasive and Ubiquitous Computing, Sep 13-17, Seattle, USA. pp 553-557, 2014
We present BendID, a bendable input device that recognizes the location, magnitude and direction of its deformation. We use BendID to provide users with a tactile metaphor for pressure based input. The device is constructed by layering an array of...