In Proceedings of the 2020 UIST 33rd ACM User Interface Software and Technology Symposium
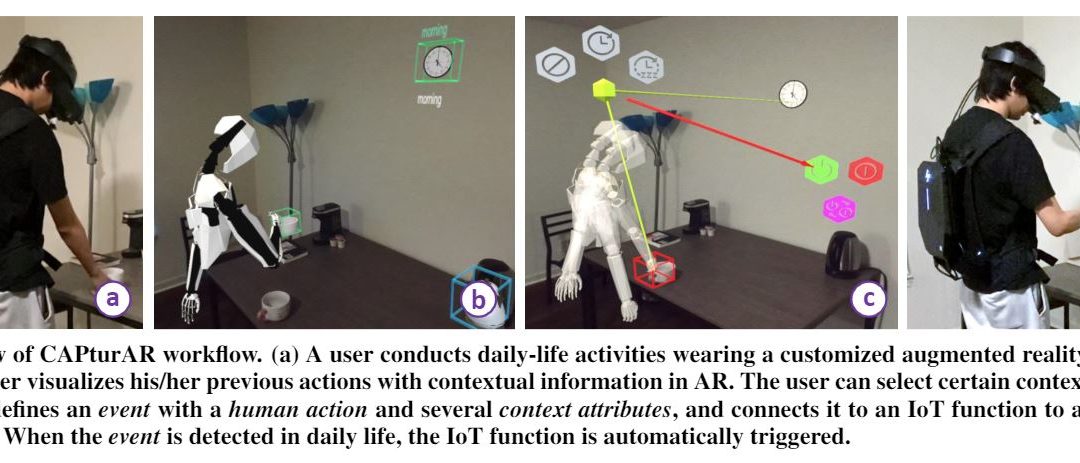
Recognition of human behavior plays an important role in context-aware applications. However, it is still a challenge for end-users to build personalized applications that accurately recognize their own activities. Therefore, we present CAPturAR,...