The Elmore Family School of Electrical and Computer Engineering (ECE) has a rich history of research and education that dates back to 1888. Many landmark innovations in radiotelephony, television, and electric power were developed by Purdue faculty - innovations that have helped shape the modern world. In that same tradition of research excellence, our ECE faculty continues to pioneer new technical frontiers. With more than 120 of the nation's finest researchers, ECE faculty and students have published hundreds of papers during the year in top quality journals and conference proceedings.
Research Areas

Automatic Control
The field of Automatic Control studies how to make systems behave in a desired manner using feedback mechanisms and proper controller designs. Automatic Control plays a critical role in almost every aspect of our daily lives, including in home appliances, automobiles, aircraft, biomedical devices, manufacturing systems, the power grid, robots, and autonomous vehicles.
The Automatic Control area has a long history of major contributions to servomechanisms, manufacturing, automation, and space exploration. In this era of the Internet and information technology, faculty are addressing challenging control problems in systems with mobility and autonomy capabilities such as large robotic swarms and automated transportation systems, smart homes and cities, humanoid robots, and unmanned systems in the air, land, and sea. Tackling these complex systems requires research and education in innovative algorithms for coordination and control of large-scale systems, machine-learning techniques for perception and cognition capabilities that allow the systems to adapt to unstructured/unknown environments, and game-theoretic approaches to ensuring security and reliability. The faculty look forward to working with enthusiastic and highly motivated students to solve these challenging problems.
Communications, Networking, Signal & Image Processing
The Communications, Networking, Signal & Image Processing (CNSIP) research area deals with the processing of information and signals that are part of our everyday lives. Applications include wireless mobile communications, radar, image processing, medical imaging, computer vision, speech recognition and synthesis, remote sensing, computer networking, and multimedia communication and processing. Research in these areas impact how we communicate with cellular phones and the Internet; the way that we travel using GPS and intelligent highways; how a machine automatically interprets and understands the visual world using images and videos; how we process the video, audio, and data that we communicate for personal entertainment and electronic commerce; and how virtual assistants recognize our voices and respond to our queries. Prospective students will be exposed to the latest research in this broad area. In addition to the topics above, this includes Information forensics, Machine learning, Computational imaging, Video analytics, 5G, millimeter waves, and Smart grid networking.

Computer Engineering
The biggest companies in the world—Apple, Amazon, Google, Facebook, Microsoft—are built on the technologies developed by computer engineers and computer scientists. But computer engineers are vital not only to those giant tech companies. No modern company can survive without the software and the hardware you will learn to design and to build in Computer Engineering at Purdue. As a computer engineer you will master technologies that can address critical societal needs in domains such as health care, national security, space research, technology for special needs children, and more. Computer Engineers learn about the full computing stack. They learn about hardware—from circuits to microcontrollers to general-purpose microprocessors. They learn about systems software—the operating systems, programming languages, compilers, and networking software that no modern computer can be without. They learn about algorithms that transform concepts to actions. And they learn about the grand challenges that drive modern computing: security, artificial intelligence, the Internet of Things, and beyond. Computer Engineering faculty are at the forefront of tackling these challenges through their path-breaking research which leads to high-impact inventions and which are translated to what they teach in the classrooms. Unlock your potential to shape the future of computing with Computer Engineering at Purdue.
Fields and Optics
The Fields and Optics (FO) area consists of 16 primary faculty (and 16 affiliated faculty) who study electromagnetic waves, both experimentally and theoretically. Such waves are ubiquitous, encompassing a broad range of phenomena encountered in many contexts including everyday life, from radio waves through optics and beyond. In the radio frequency domain, applications include cellular networks, radios, radar, remote controls, and integrated circuit design, as well as other forms of wireless communication and sensing. In the optical domain, applications include lasers, light emitting diodes, fiber optics for long-haul telecommunications, smartphone cameras, medical sensing, photovoltaics and other forms of renewable energy, nano and quantum photonics, photonic materials, manufacturing and quality control, telescopes, microscopes, and many more. The work of the FO area is also expected to play an important role in future technologies, such as 5G, quantum information, quantum computing, autonomous vehicles, videophones, and portable medical sensors.
Microelectronics & Nanotechnology
The Microelectronics and Nanotechnology (MN) area consists of twenty-plus faculty members with active research and instructional programs in Nanoelectronics, Energy Conversion, Nanomaterials, Micro and Nanoelectromechanical Systems (MEMS/NEMS), Wide Bandgap Semiconductors,Computational Nanotechnology, and Nanophotonics. Experimental programs are located primarily in the new state-of-the-art facility at the Birck Nanotechnology Center (BNC). Purdue is also the home of the NSF-sponsored Network for Computational Nanotechnology (NCN) that created the science gateway nanoHUB.org with nearly 100,000 users worldwide.
Schweitzer Power and Energy Systems
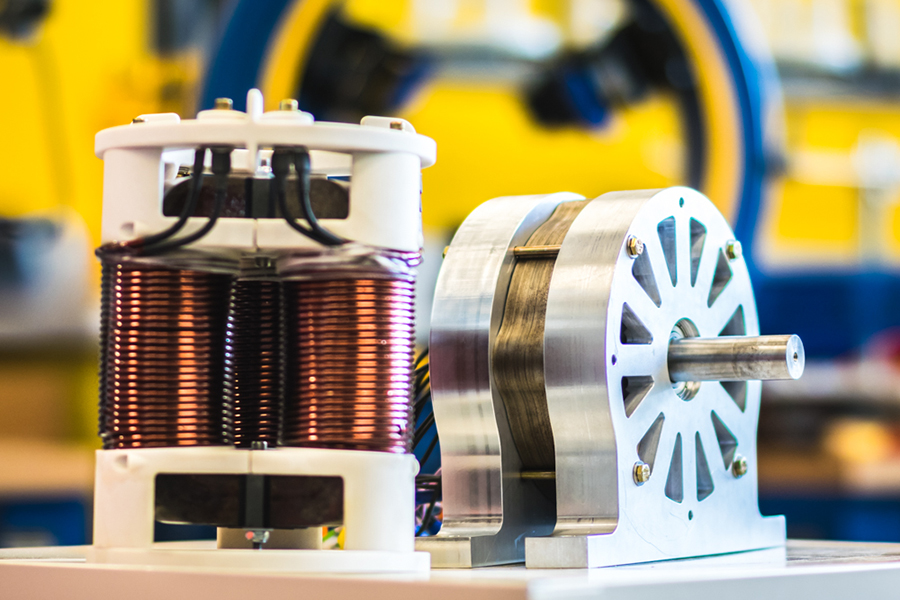
This area focuses on electrical power engineering and the electrical to non-electrical energy conversion process. Topics of interest include electromechanical component design, power electronics design, passive component design, power magnetics, electric drives, electric propulsion systems, vehicle (ship, spacecraft, automotive) electric systems, and power system control and stability.
In the push for sustainability and reduced carbon emissions, energy conversion technologies are critical. Energy sources and systems faculty are at the forefront of modern electromechanical component and system design, analysis, and control. They also have significant efforts in power electronics – particularly in the areas of control and passive component design.
As the demand for higher reliability and efficiency on aircraft and marine platforms increases, hydraulic control systems are being replaced by electric drive systems. Research is underway to accurately model the performance of alternative power-by-wire electric drive systems. Computer simulation packages are being designed that accurately evaluate complete power-by-wire systems, including actuators, converters, electric drives, and electrical distribution systems. Evaluation and design of electric propulsion systems is also in progress. The deregulation of the electric utilities coupled with the integration of alternative energy sources provides new challenges in power distribution and control. Current research includes evaluating the impact of deregulation on power quality, optimal control of the distribution system, and instability detection.
The Schweitzer Power and Energy Area has several research and undergraduate laboratories including the Grainger Energy Conversion and Microgrid Laboratory, the Grainger Power Magnetics Fabrication Laboratory, the Energy Storage and Material Characterization Laboratory, the Electric Vehicle Systems Laboratory, the Energy Systems Simulation Laboratory, the High Speed Machines Laboratory, the Alternative Energy Grid Integration and Systems Laboratory, and the Special Projects Laboratory.

VLSI and Circuit Design
Research is conducted in VLSI circuits and computer-aided design, building blocks for new circuit technology, integrated circuit testing and fault diagnosis, digital signal processing, computer-aided synthesis, field programmable gate arrays (FPGAs), and design of low-power circuits. Software tools are under development to assist engineers in the simulation and design of VLSI circuits.
Portable communication and computation have driven the need for low-power electronics. Recent progress has been made in creating tools for estimating power dissipation in CMOS circuits. The research approach is to use accurate and efficient power estimation techniques to drive the design of new low-power systems. Software tools for testing integrated circuits, rapid fault simulation, and failure analysis are also being developed.
New solid state technology and logic devices have provided the opportunity to change the way that digital systems are designed. Recent research has been initiated on automatic architecture synthesis for FPGAs, hardware and software co-design, low-power datapath synthesis, and smart power SiC integrated circuits.
The VLSI Design and Test Laboratory consists of a suite of high-performance workstations, integrated circuit testers, and commercial computer-aided design software. The laboratory is used for designing low-power and highly testable integrated circuits and for developing design automation software for fault diagnosis, testing, simulation, power estimation, and synthesis.