Optical & Ranging Sensor Integration
A variety of applications in today's society demand the fast and reliable collection of data about physical objects. Such applications require the availability of information pertaining to the geometric and semantic characteristics of those objects in which surfaces play an important role. Photogrammetry is still the conventional method for surface reconstruction (Figures 1 and 2). However, LIDAR systems, whether ground based, airborne, or space borne, have recently emerged as a new technology with a promising potential towards dense and accurate data capture on physical surfaces (Figures 3 and 4). Photogrammetry and LIDAR have unique characteristics that make either of them preferable in specific applications. For example photogrammetry is more suited for mapping heavily populated areas while LIDAR is preferable in mapping Polar Regions. One can observe that a negative aspect in one technology is contrasted by a complementary strength in the other. Therefore, integrating the two systems would be extremely beneficial. However, the complementary information can only be fully utilized after successful alignment and absolute orientation of the photogrammetric and LIDAR models relative to a common reference frame.

Figure 1. Aerial Digital Optical Image

Figure 2. Photogrammetric Operation Principle

Figure 3. LIDAR Data Acquisition
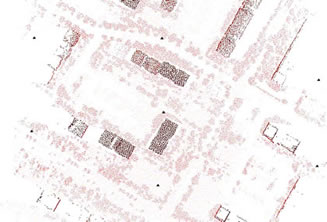
Figure 4. Aerial LIDAR Range Scan
1. LIDAR Data as the Source of Control for Photogrammetric Models
This ongoing research deals with different alternative approaches for utilizing linear features derived from LIDAR data as control information for aligning the photogrammetric model relative to the LIDAR reference frame. LIDAR derived lines can be used as control information directly in the photogrammetric triangulation. Another alternative is to start by generating a photogrammetric model through a photogrammetric triangulation using an arbitrary datum (no control information). LIDAR features are then used as control information for the absolute orientation of the photogrammetric model. Intensity images collected by today's LIDAR systems can be used to measure features that also appear on photogrammetric images (Figures 5 and 6).

Figure 5. Aerial Digital Optical Image

Figure 6. Aerial LIDAR Intensity Scan
2. Integration for Close Range Applications
Ground-based LIDAR scanners require a stable platform where the system can be set up long enough for collecting the range data at the required resolution. Full coverage of close range objects requires adjacent scanning sessions (i.e., the LIDAR system should be moved around the object). However, there might be some restrictions with regard to setting up and/or operating the scanner (e.g., inaccessible and/or unstable scanning locations). Hence, it is not always possible to fully capture the object in question. In this regard, photogrammetry has the advantage of being able to quickly capture overlapping imagery with full coverage of the object to be mapped. Nevertheless, photogrammetric mapping is only possible providing that some control information is available. Establishing control information is not always possible (for the same reasons mentioned earlier; e.g., inaccessibility or instability). Since LIDAR provides scaled models of the object, the integration of LIDAR and photogrammetry would overcome the drawbacks of the individual systems. Figures 7 through 10 show two examples of close range photogrammetric and LIDAR datasets.

Figure 7. Close-range Digital Optical Image
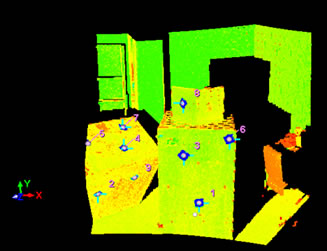
Figure 8. Close-range LIDAR Range Scan

Figure 9. Close-range Digital Optical Image
Figure 10. Close-range LIDAR Range Scan
3. Integration for Calibration Purposes
Prior to integrating photogrammetric and LIDAR datasets, both systems should be precisely calibrated and aligned. The calibration is usually completed for each system independently using additional control information. The calibration of the laser and photogrammetric systems is evaluated by checking the quality of fit between co-registered photogrammetric and laser surfaces. Experiments with real data are used to illustrate this concept.