Lab Facilities

Lab Introduction
AIMS Lab at ARMS 3106-3 is developed for research on robotics and cooperative autonomy. The lab is equipped with various types of unmanned aerial and ground vehicles, robotics arms, mobile robots, motion capture systems and super computers. we have developed a multi-agent testbed connecting heterogeneous unmanned aerial vehicle (UAV), unmanned ground vehicles (UGV) such as iRobots, Jackal UGV, AR Drones, and also various types of mini-drones (Parrott Spiders, Crazyflies). We have also developed algorithms for intelligence of individual robotics platforms such as Kinova arms, dog robots, etc.

Dog Robot
This is a platform to test control algorithms for navigation of autonomous robots in bad road conditions.
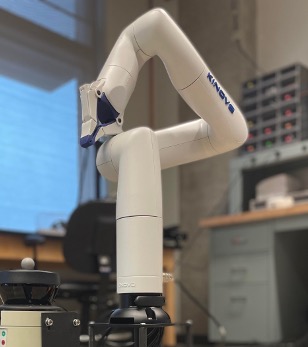
Robotics Arm
A Kinova robotics arm for object manipulation.

Jackal UGV
Jackal Unmanned Ground Vehicle (UGV) for Exploration.

Drone Design for Energy Efficiency
We have built a bicopter to achieve energy efficiency while enabling vertically take off and landing. Control of the UAV includes two phases, that is, propellers enable the UAV for VTOL (Phase I), and Propellers tilt to reach enough horizontal speed for fixed wings to generate aerodynamic lift (Phase II).

Collaboration of Multi-Drones
A big UAV carries a small one for long distance travel. When they are close to target area, the small UAV autonomously takes off for missions, then autonomously lands back to the base UAV by only using its onboard cameras.
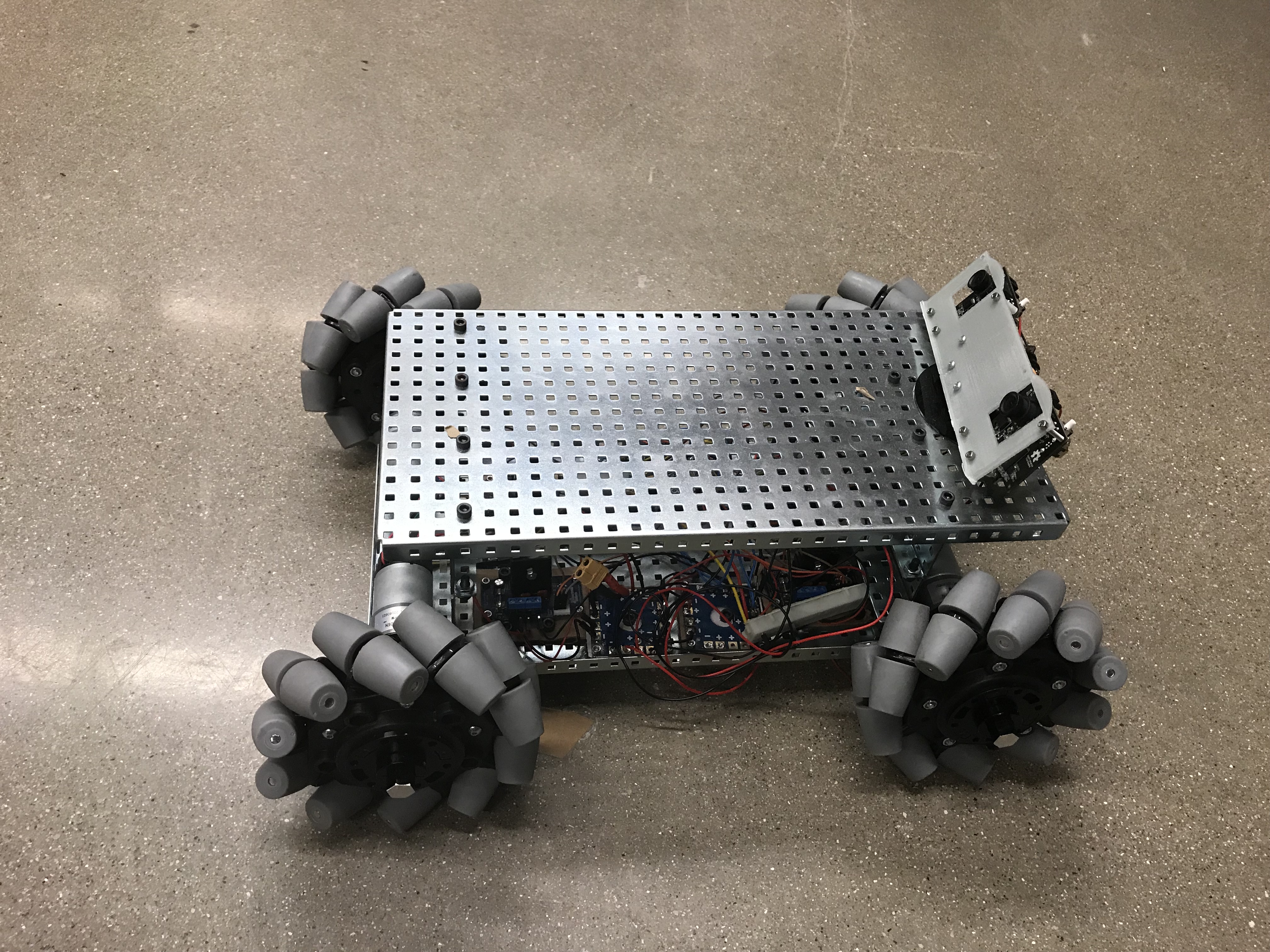
Unmanned Ground Vehicle Design
We have built an unmanned ground vehicle for the purpose of collaboration with aerial vehicles.

Formation Control of Multi-Robots
We have developed a platform consisting of three iRobots for implementation of algorithms for formation control. Further applications into surveillance, coverage and exploration of the unknown are in progress.