|
Reachability analysis and efficient computation for nonlinear/hybrid systems
Researchers: Jinhua Li (PhD candidate)
- Approximate algorithms that can solve the Hamilton-Jacobi-Isaacs (HJI) PDE for game theory or Hamilton-Jacobi-Bellman (HJB) PDE for optimal control (or optimization problems in general) in real-time. For approximation, weuse a polytopic approximation method.
- Numerical algorithms that can efficiently solve necessary conditions, HJB, and HJI equations for various optimization problems including optimal control, game theory, etc. With our best knowledge, this method is a new algorithm based on transformation not on either gradients or grids which most currently available algorithms are based on. For transformation, we use the D-Transformation which is a differential transformation while Laplace and Fourier transformations are integral transformations. By using this methods, we solve a set of algebraic equations in the transformed domain rather than a set of (partial) differential equations (Figure 1).
|
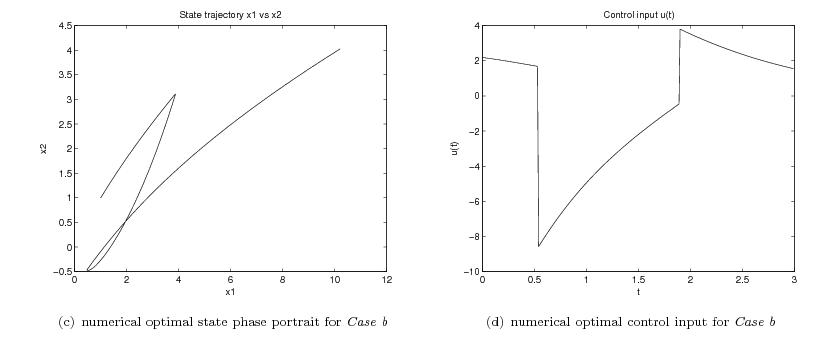
Figure 1. Numerical simulations of the optimal state trajecotry and optimal control law for a two-mode hybrid
system optimal control problem by using the differential transformation based numerical algorithms
|
