|
Plane-Landmark Applications to Simultaneous Localization and Mapping and Conflict
Detection and Resolution in Urban Environments
Researchers: James Goppert (Master student)
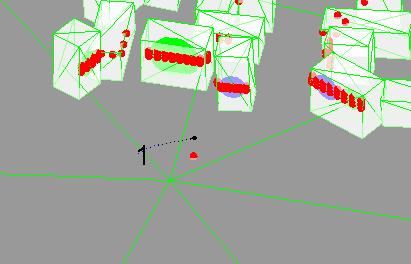
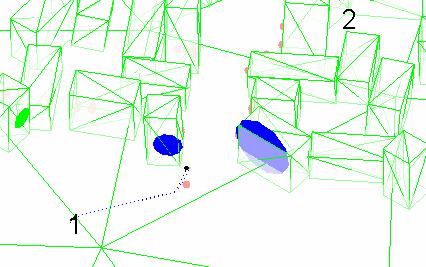
Accurate localization and confliction detection and resolution are both necessary for unmanned vehicles to navigate urban environments. Correct localization ensures waypoints are reached. Conflict detection and resolution prevents vehicle loss.
Current systems typically rely on GPS or visual sensors. GPS signal is jeopardized in urban environments due to the possibility of hostile jamming and signal obstruction due to buildings. Visual sensors require digital signal processing and lack the ability of high accuracy ranging.
The objective of this research is to develop plane-landmark algorithms to allow simultaneous localization and mapping as well as conflict detection and resolution in urban environments. The algorithm will be tested and refined using software in the loop simulations until it is flight worthy and can be tested.
|
| 