Learning Time-Variant Graph-Structured Data for Robotics
Objectives
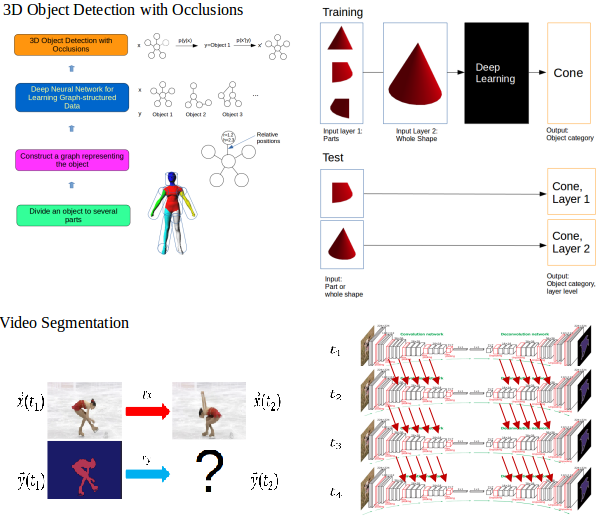
Early deep learning methods such as convolutional neural networks and recurrent neural networks mainly handled grid-structured inputs of audio or image. Recently, new deep learning approaches have focused on representing and modeling graph-structured data. Besides, performing real-time task is critical issue in robotics, which requires managing time-variant data. In this research, we aim to focus on a new framework for deep learning based on time-variant graph-structured data.
Potential Applications
3D Object detection, Visual mapping and Autonomous driving